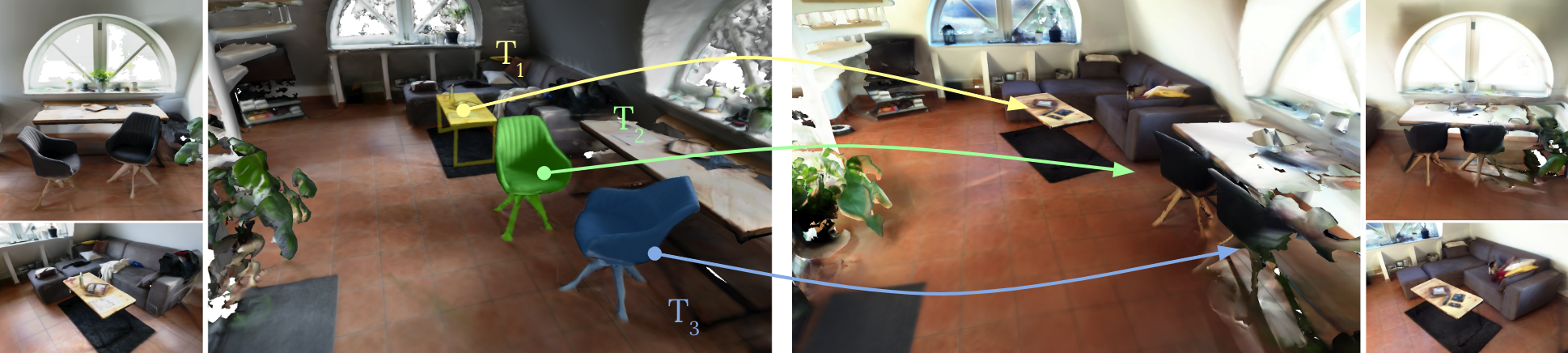
3R-Scan is a large scale, real-world dataset which contains multiple 3D snapshots of naturally changing indoor environments, designed for benchmarking emerging tasks such as long-term SLAM, scene change detection and object instance re-localization.
Paper
International Conference on Computer Vision (ICCV 2019)Paper | arXiv
@inproceedings{Wald2019RIO,
title={RIO: 3D Object Instance Re-Localization in Changing Indoor Environments},
author={Johanna Wald, Armen Avetisyan, Nassir Navab, Federico Tombari, Matthias Niessner},
journal={Proceedings IEEE International Conference on Computer Vision (ICCV)},
year={2019}
}